Totzeit-Glied
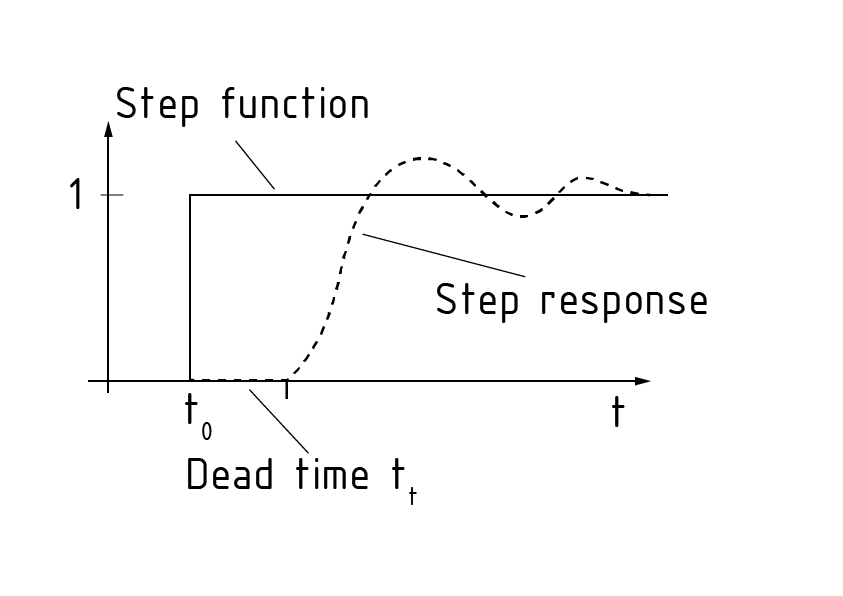
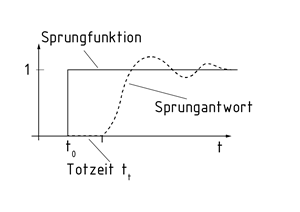
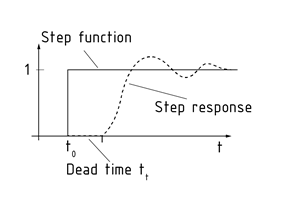
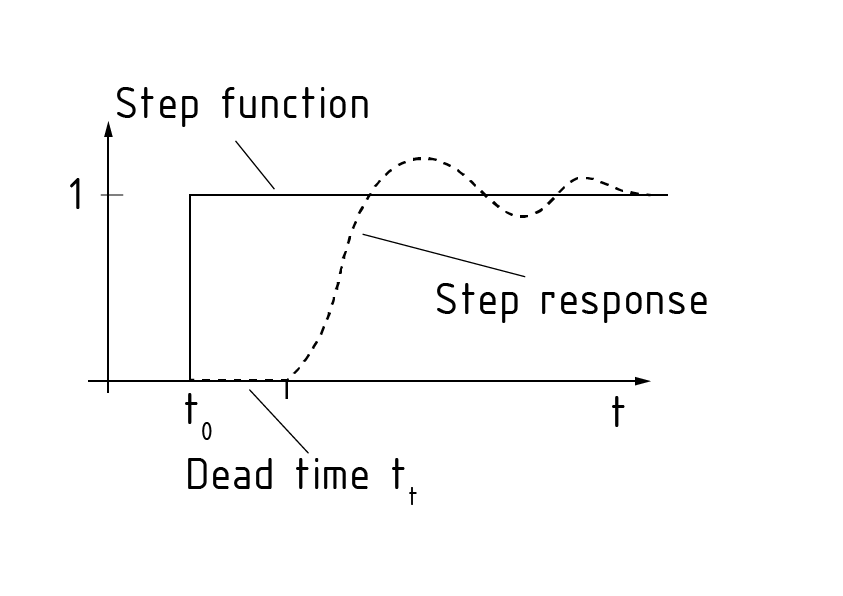
Die Totzeit ${{T}_{t}}$ beschreibt in der Regelungstechnik die Zeit, die nach Änderung des Systemeingangs bis zur Antwort des Systemausganges verstreicht. Neben dem Begriff Totzeit wird oftmals auch der Terminus Totzeitglied benutzt. Totzeitglieder erschweren eine genaue Regelung und sind grundsätzlich zu vermeiden beziehungsweise so gering wie möglich zu halten. Eine Änderung am Systemausgang kommt erst dann zustande, wenn eine bestimmte Strecke durchlaufen wurde. Die dafür benötigte Zeit ist die Totzeit.
Totzeiten sollten dabei nicht mit Verzögerungszeiten verwechselt werden. Bei einer Verzögerungszeit reagiert ein System nach einer bestimmten Zeit aufgrund physikalischer Phänomene wie der Massenträgheit. Die Antwort am Systemausgang ändert sich dabei aber sehr wohl. Totzeiten sind immer Laufzeiten.
Beispiel der Totzeit eines Transportbandes: Am Eingang des Systems wird ein Warenstrom aufgeladen. Bis sich am Systemausgang (am Ende des Förderbandes) eine Änderung einstellt, muss die Ware zunächst das gesamte Förderband durchlaufen. Sofern eine Regelstrecke durch ein reines Totzeitglied gegeben ist, wird der Einsatz eines I- oder PI-Reglers notwendig. P-, PD- und PID-Regler sind für diese Anwendung unbrauchbar.

dead-time element
-
Example sentences:
- In addition to dead time, the term dead-time element is also used.
- If a controlled system comprises a pure dead-time element, it is necessary to use an I or PI controller.
- Dead-time elements make precise control more difficult and should, in principle, be avoided or minimised.
delay element
lagging element

elemento de retraso
Elemento de tiempo muerto
En la tecnología de control de bucle cerrado, el tiempo muerto ${{T}_{t}}$ es el tiempo entre el cambio de la entrada del sistema y la respuesta de la salida del sistema. Además del tiempo muerto, también se usa el término elemento de tiempo muerto. Los elementos de tiempo muerto dificultan un control preciso y deben, en principio, ser evitados o minimizados. La salida del sistema solo cambia una vez que cierta distancia ha sido cubierta. El tiempo requerido para esto es el tiempo muerto.
Los tiempos muertos no se deben confundir con tiempos de retraso. En el caso de un tiempo de retraso, el sistema responde después de un cierto tiempo debido a un fenómeno físico como el momento de inercia de masa. Sin embargo, la respuesta en la salida del sistema en toda probabilidad cambia. Los tiempos muertos siempre son tiempos de propagación.
Tomemos por ejemplo el tiempo muerto de una banda transportadora. Los artículos son cargados en la entrada del sistema y deben pasar por toda la banda transportadora antes de que ocurra un cambio en la salida del sistema (en el final de la banda transportadora). Si un sistema controlado comprende de un elemento de tiempo muerto puro, se debe usar un controlador I o PI. Los controladores P, PD y PID no pueden usarse para esta aplicación.
Respuesta de paso para un circuito RC con tiempo muerto
Elemento de tiempo muerto
En la tecnología de control de bucle cerrado, el tiempo muerto ${{T}_{t}}$ es el tiempo entre el cambio de la entrada del sistema y la respuesta de la salida del sistema. Además del tiempo muerto, también se usa el término elemento de tiempo muerto. Los elementos de tiempo muerto dificultan un control preciso y deben, en principio, ser evitados o minimizados. La salida del sistema solo cambia una vez que cierta distancia ha sido cubierta. El tiempo requerido para esto es el tiempo muerto.
Los tiempos muertos no se deben confundir con tiempos de retraso. En el caso de un tiempo de retraso, el sistema responde después de un cierto tiempo debido a un fenómeno físico como el momento de inercia de masa. Sin embargo, la respuesta en la salida del sistema en toda probabilidad cambia. Los tiempos muertos siempre son tiempos de propagación.
Tomemos por ejemplo el tiempo muerto de una banda transportadora. Los artículos son cargados en la entrada del sistema y deben pasar por toda la banda transportadora antes de que ocurra un cambio en la salida del sistema (en el final de la banda transportadora). Si un sistema controlado comprende de un elemento de tiempo muerto puro, se debe usar un controlador I o PI. Los controladores P, PD y PID no pueden usarse para esta aplicación.
Respuesta de paso para un circuito RC con tiempo muerto

延迟元件
滞后元件
纯滞后元件